

Innovación en el IES Polígono Sur: Programando el Futuro con Maqueen y Micro:bit

En las aulas del IES Polígono Sur, la tecnología no solo se estudia, se construye. Recientemente, el alumnado de la ESO, bajo la guía del profesor Francisco Javier Márquez Villar, se ha sumergido en el apasionante mundo de la robótica educativa.
Utilizando la placa Micro:bit y el vehículo robótico Maqueen, los estudiantes han superado el reto de dar «vida» a sus máquinas a través de tres proyectos de programación que combinan lógica, sensores y mucha creatividad.
Los Retos de Programación
A continuación, detallamos las tres misiones que nuestros programadores y programadoras han resuelto con éxito:
Proyecto 1: Empatía Robótica

En este primer contacto, el Maqueen debía avanzar en línea recta mostrando una cara sonriente en su matriz de LEDs. El desafío consistía en detectar el final de un recorrido: al tocar una línea negra, el robot se detiene automáticamente, cambia su expresión a una cara triste y emite una melodía melancólica. ¡Una forma brillante de entender los sensores de infrarrojos y las salidas de audio!
Proyecto 2: Maniobras de Evasión

Elevamos la complejidad técnica. Aquí, el vehículo avanza de forma continua hasta detectar la línea negra. En ese instante, el código activa una maniobra de seguridad: el Maqueen da marcha atrás girando hacia la izquierda mientras activa su intermitente derecho. Tras completar la maniobra de retroceso, el robot retoma su avance, simulando un sistema de navegación autónoma básico.
Proyecto 3: El Rastreador de Líneas (Line Follower)
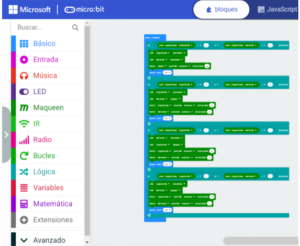
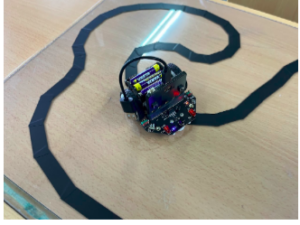
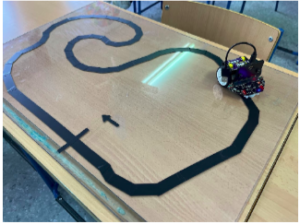
Este es el proyecto más avanzado, donde el alumnado ha programado un sistema de corrección en tiempo real basado en la lectura de los dos sensores frontales (valor «0» para el negro):
-
En trayectoria: Si ambos sensores detectan negro, el robot avanza recto.
-
Corrección Izquierda: Si el robot se sale por la izquierda, activa el LED izquierdo y solo mueve la rueda izquierda para pivotar de vuelta a la línea.
-
Corrección Derecha: Si se sale por la derecha, activa el LED derecho y mueve solo la rueda derecha.
-
Búsqueda activa: Si pierde la línea por completo, el robot inicia un giro preventivo (rueda izquierda) hasta reencontrar el camino marcado.
Conclusión y Aprendizajes
Más allá de ver a los robots moverse, esta actividad ha permitido al alumnado trabajar el pensamiento computacional, la resolución de problemas y el trabajo en equipo. Gracias al apoyo de Francisco Javier Márquez Villar, el aula se ha convertido en un laboratorio donde el error es parte del aprendizaje y el éxito se celebra en código.
Podéis comprobar los resultados en los siguientes vídeos:
¡Enhorabuena a todo el alumnado por estos fantásticos resultados!



{kind=link}